バイコヌール宇宙基地から2019年8月22日(モスクワ標準時)に打ち上げ予定のソユーズMS-14。この宇宙船には人間の代わりに、ロボットの宇宙飛行士(コスモノート)が乗って国際宇宙ステーションに向かいます。



このロボット宇宙飛行士の名は、Skybot F-850。ロシア緊急事態省が主導して開発したもので、開発段階では「ヒョードル」という名前で呼ばれていました。AIを使った自律モードとアバターモード、2種類の動作モードを切り替え、宇宙飛行士の活動を支援します。電源は、ロシアの船外活動用宇宙服オーラン(ロシア語で「ウミワシ」の意)と共通のバッテリーを使用しています。

Skybot F-850最初のミッションは、ソユーズMS-14に単独で乗り組み、宇宙船の状態をモニターすること。ソユーズMS-14は、新世代のソユーズ2.1aロケットを使用して打ち上げられる最初の有人宇宙船。これまでのソユーズFGロケットからエンジンの推力が強化され、飛行制御システムもデジタル化されています。

これまでソユーズ2.1aは、2004年の試験飛行以来、人工衛星の打ち上げで実績を積んできました。2015年からは、有人型のソユーズ宇宙船とほぼ同じ構造のプログレスMS補給船の打ち上げも始まり、国際宇宙ステーションへの飛行も重ねています。2019年7月31日に打ち上げられたプログレスMS-12では、打ち上げ後わずか3時間18分31秒後(軌道周回2周分)に国際宇宙ステーションにドッキングし、打ち上げからドッキングまでの最短記録を樹立しています。
そしていよいよ有人型のソユーズ宇宙船を打ち上げることになったのですが、いきなり宇宙飛行士を乗せて、もしものことがあったら大変です。そこで宇宙飛行士と同じように動けるヒューマノイドタイプのロボットを代わりに乗せ、大きくなったロケットの推力が人体にどのような影響を与えるかのデータを収集しようという訳です。
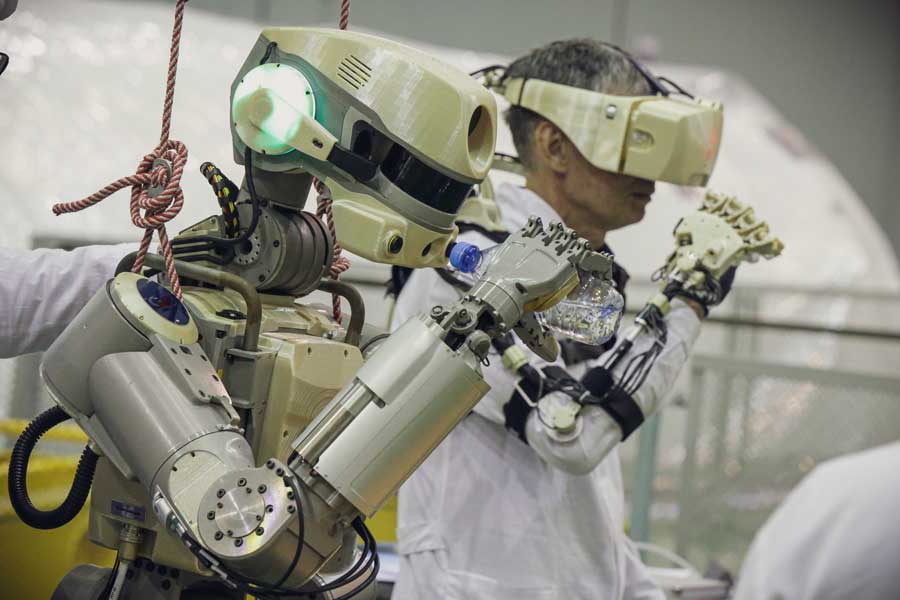
Skybot F-850のアバターモードでは、地上など離れた場所にいるオペレーターがヘッドマウントディスプレイとマニピュレータ操作アームを装着し、VRでオペレーターの動きをトレースして操作することが可能。5本指の手では器用にペットボトルのフタを開けたり、工具を使用することもできます。これで宇宙船内の状態をモニターし、人間の代わりに機器の操作をして検証しようという訳です。


国際宇宙ステーションに到着したSkybot F-850は、地上のオペレーターが操作し、無重量状態の宇宙ステーション内部で問題なく動くことができるか、様々な試験を行います。この試験が成功すれば、次世代型では船外活動(EVA)試験を実施し、将来的にはリスクを伴う有人船外活動の機会を代替することを目指します。

国際宇宙ステーションにおけるSkybot F-850の試験は2週間の予定。9月上旬には再びソユーズ宇宙船に「搭乗」し、地球へと帰還することになっています。
<出典・引用>
ロスコスモス プレスリリース
Image:Roscosmos
(咲村珠樹)